- The robot can follow both black and white lines.
- It has uses an LDR (light depending resistor) sensor array to follow the line.
- It is controlled by an Atmega32 running at 1 MHz.
- The program is written in C using WinAVR as given below for two sensors arrangement.

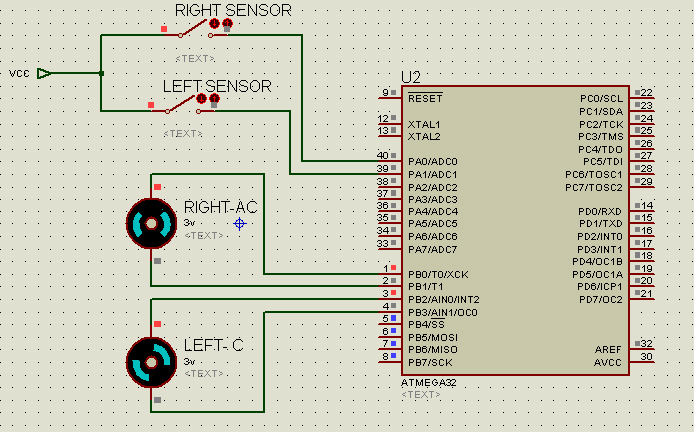 |
| Figure :- Simulation Circuit in Protious |
#include<avr/io.h>
#include<util/delay.h>
void main()
{
DDRA=0B00000000;
DDRB=0B11111111;
unsigned char a;
while(1)
{
a=PINA & 0B00000011;
if (a==0B00000000)
{
PORTB=0B00000101;//robot is at correct position & go forward
}
else if(a==0B00000001)
{
PORTB=0B00000110;)//robot at left direction so turn right
{kind=link}
}
else if(a==0B00000010)
{
PORTB=0B00001001;//robot at right direction so turn left
}
else
PORTB=0B00000101;//at correct position & go forward
}
}
gr8 job keep it up
ReplyDelete